Inter-Scheduler Interfaces
In a flowgraph that uses multiple schedulers, these schedulers must communicate with each other through the input queues of their threads, notifying each other when work has been done amongst other things
Previously, we had given a scheduler a push_message method. Let’s generalize this now to a neighbor_interface class from which schedulers will derive. Note that this interface only has one method push_message which is the only way to communicate with a scheduler.
struct neighbor_interface
{
neighbor_interface() {}
virtual ~neighbor_interface() {}
virtual void push_message(scheduler_message_sptr msg) = 0;
};
In order to incorporate the neighbor_interface with the schedulers we will
- Derive from neighbor interface
(runtime/include/gnuradio/scheduler.h)
-class scheduler : public std::enable_shared_from_this<scheduler>
+class scheduler : public std::enable_shared_from_this<scheduler>, public neighbor_interface
Partitioning the Flowgraph
The burden is not on the user to create all these hidden connections such as Inter-Scheduler interfaces, so we take the simply-created flowgraph with blocks and edges, and partition it across the specified schedulers
User Configuration
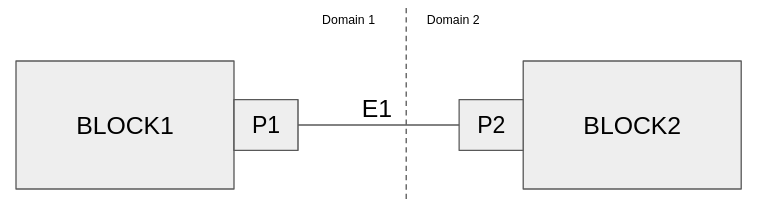
Say the user wants to create a simple flowgraph which is src->block1->block2->snk, and there is a domain boundary between block1 and block2. The user needs to provide the following to inform the flowgraph partitioning where the blocks should go
First, create the scheduler objects - these could be different domain schedulers, but for now we will just use the default scheduler
auto sched1 = schedulers::scheduler_nbt::make("sched1");
auto sched2 = schedulers::scheduler_nbt::make("sched2");
Next, create the runtime object and add the schedulers to it. The initialize method will handle the partitioning across the schedulers
auto rt = runtime::make();
rt->add_scheduler({ sched1, { src, mult1 } });
rt->add_scheduler({ sched2, { mult2, snk } });
rt->initialize(fg);
… and run the flowgraph (via the runtime) as usual
rt->start();
rt->wait();
Partitioning the graph
The flowgraph object is now responsible for breaking up the user flowgraph into smaller subgraphs. Inside flowgraph::partition, the bulk of the work to this end is being done by graph_utils::partition, and there is a lot going on in this method, which takes in the graph, the schedulers, the domain confs and returns an information struct about the partitioned graph
static graph_partition_info_vec
partition(graph_sptr input_graph,
std::vector<scheduler_sptr> scheds,
std::vector<domain_conf>& confs);
The partition method performs the following
- Create the subgraphs from the nodes that are cohesive in each domain
- In the example above this would create
subgraph[0]withsrcandblock1, thensubgraph[1]withblock2andsnk
- In the example above this would create
- Save the edges that crossed domains
- Such as the edge between
block1andblock2
- Such as the edge between
- Add any orphan nodes into the appropriate subgraph, even though they are not directly connected but are encapsulated by the domain definition
- Set up Inter-Scheduler Interfaces from the saved domain crossings from step (2)
Let’s look at step (4) in more detail, and use the connection between block1 and block2 as the example
For each detected crossing, we need to
- Find the
srcanddstnodes from the stored subgraphs (some brute force searching)for (auto c : domain_crossings) { // Find the subgraph that holds src block graph_sptr src_block_graph = nullptr; for (auto info : ret) { auto g = info.subgraph; auto blocks = g->calc_used_nodes(); if (std::find(blocks.begin(), blocks.end(), c->src().node()) != blocks.end()) { src_block_graph = g; break; } } // Find the subgraph that holds dst block graph_sptr dst_block_graph = nullptr; for (auto info : ret) { auto g = info.subgraph; auto blocks = g->calc_used_nodes(); if (std::find(blocks.begin(), blocks.end(), c->dst().node()) != blocks.end()) { dst_block_graph = g; break; } } src_block_graph->add_edge(c); dst_block_graph->add_edge(c);
When these edges are added, the port objects that are connected get a reference to each other.